Advanced Terminal Mapping with DataXplorer™ Uncrewed Surface Vehicle
Mission
Oil & gas companies frequently conduct dredging operations at sites worldwide to maintain sufficient under-keel clearance for vessels. Traditionally, bathymetric surveys using manned vessels have been employed to determine dredging needs, often impacting terminal operations and logistics. In search of a more efficient solution, one major oil & gas company explored alternative methods that could be implemented concurrently with terminal operations, offering easy mobilization and cost-effectiveness for frequent surveys.
The project aimed to map seabed topography, assess siltation rates, and identify underwater features. This comprehensive approach sought to understand the underwater landscape, calculate dredge volumes, and predict future dredging needs to ensure safe navigation. Open Ocean Robotics' DataXplorer™, an uncrewed surface vehicle (USV) equipped with an advanced sonar system was deployed to collect detailed underwater data. This data was then processed to create accurate maps and profiles of the seabed, facilitating informed decision-making for dredging activities.
DataXplorer™ provides a cost-effective and efficient alternative to traditional survey methods, enabling continuous and real-time seabed monitoring without disrupting operations. To learn more about how DataXplorer™ supports offshore energy operations, visit our Offshore Energy Market page

Scope of Work
-
Calculate dredge volumes and construct dredge cross-sections and plan drawings to compare measured values against permitted cross-section
-
Determine siltation rates and anticipate timing before critical under-keel clearance (UKC) is reached, helping define the next dredging cycle.
-
Predict potential draft loss due to excessive siltation if dredging is not performed
GOALS



HIGHLIGHTS
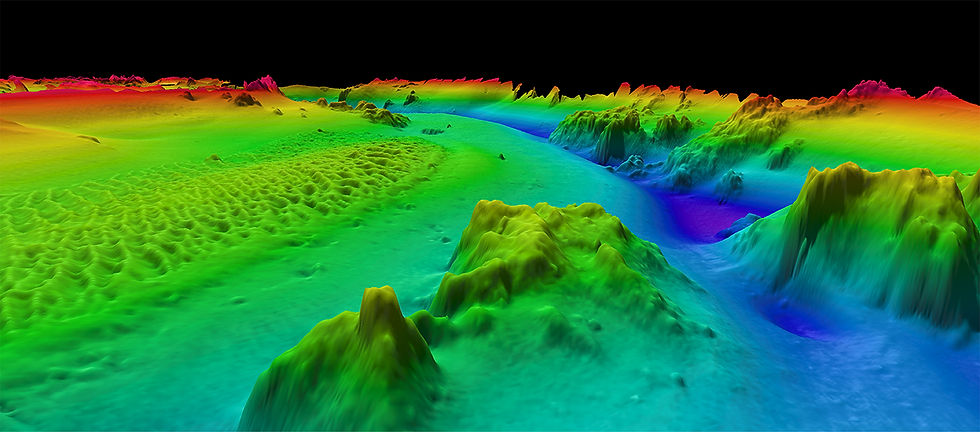
Open Ocean Robotics successfully mapped the Terminal using the DataXplorer™ USV with integrated PING DSP 3DSS-DX-450 3-D Sidescan sonar system.




RESULTS
Uninterrupted and Continuous Operations

Using DataXplorer™ during this mission ensured continuous operations thanks to its advanced solar-powered technology, which provided a reliable and sustainable energy source. This enabled uninterrupted data collection and transmission, significantly reducing operational costs and minimizing environmental impact.


Real-time Data Transmission
.png)
Additional data transmitted in real-time included wind speed and direction, barometric pressure, water temperature, water depth, ocean temperature, AIS detections, and optical and thermal camera video, which was available for viewing on Open Ocean Robotics web-portal XplorerView™.

Remote Operations

The USV was operated by shore-based pilots in Victoria, BC and data was transmitted in real-time to both Open Ocean Robotics’ and PING DSB cloud-based portals.


DataXplorer™ Explores a Sunken Ship
During the survey, the DataXplorer™ made a remarkable discovery: a sunken ship. This vessel, originally known as the H.M.S. Prudent and later renamed the Rivtow Lion, was acquired by the Nanaimo Dive Association and intentionally sunk in 2005 to create an artificial reef. The ship, measuring 50.88 meters in length and 12.84 meters in width, now rests at a depth of about 80-90 feet, providing a habitat for various marine life and an exciting dive site for underwater explorers
PARTNERS